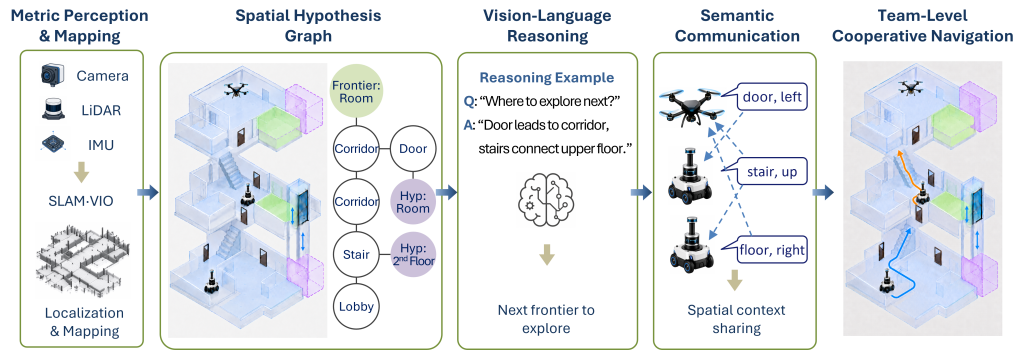
- Vision-Language Reasoning for Spatial Understanding in Unknown Environments
- Semantic Communication for Cooperative Robot Swarm Navigation
- Applications in Real-World Cooperative Robot Navigation
- Global Optimization with Reduced Computational Complexity
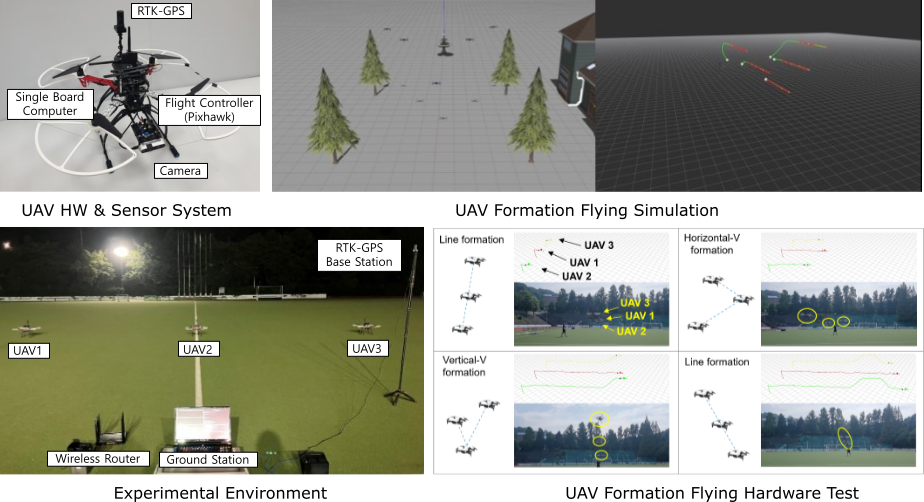
- Hardware-in-the-Loop for Real-Time Performance Validation

- Trajectory Planning with Collision Avoidance in Complex Environments
- 3D Localization and Mapping Using Lidar and Camera
- 3D Mapping for Automated Docking of Marine Vessels at Ports (Collaboration with Seadronix Corp.)
- Compensation for Ship Motion Due to Waves
